Recently I’m trying to learn ROS. But unfortunately ROS haven’t yet support Ubuntu 17.10. So I can only run ROS in docker container.
However, by default there isn’t a x window if you use the official ros image. You can’t use tools with GUI such as rviz or gazebo.
I found following docker image which also mentioned in the ROS official wiki that provide LXDE and HTML5 VNC interface.
fcwu/docker-ubuntu-vnc-desktop
So I integral these two images together and push it to docker hub.
Run the image
1 | docker run -it -p 6080:80 d4n1el/ros-vnc-desktop |
My image will run roscore automatically at startup.
Now you can browse http://127.0.0.1:6080/ to access the desktop.
Open lxterminal from menu and install turtlesim for test.
1 | # apt && apt install ros-kinetic-turtlesim |
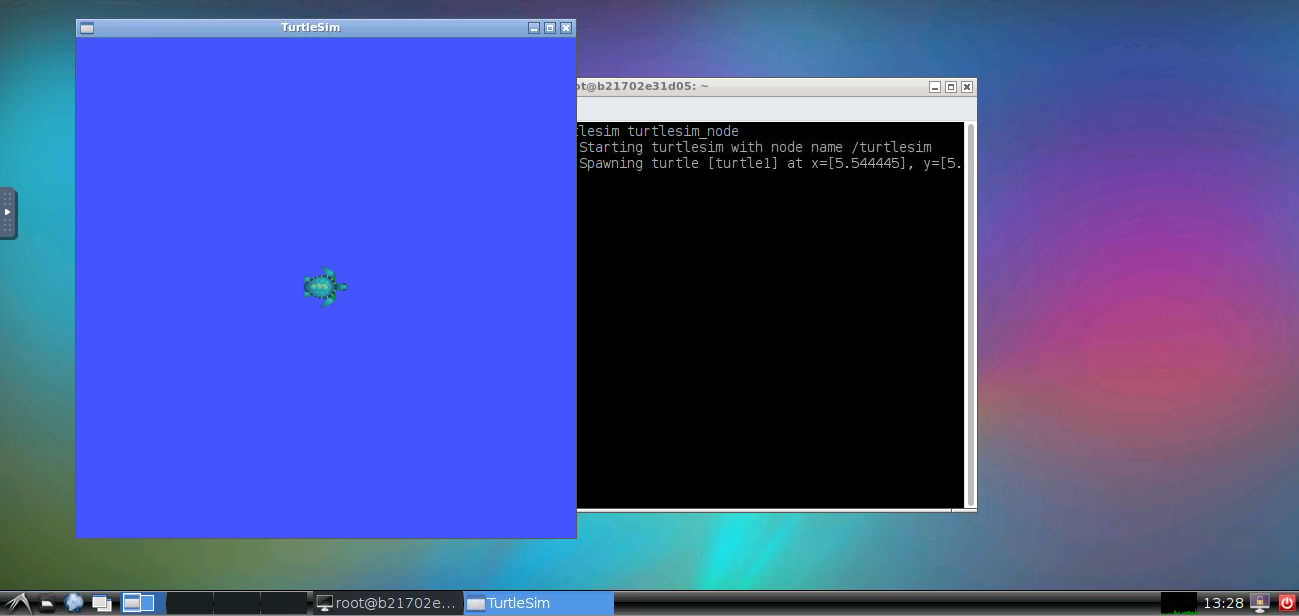
Run turtlesim1
If you see a turtle showing up on your screen, then you’re success.