
This tutorial will cover some tips about writing publisher using python on the system we setup.
Dependencies
In this tutorial, we need rospy and std_msg to create our publisher/subscriber node.
Usually, these two package is included in the basic ROS installation. But if you do not have these two packages install, please refer to Installing Packages if your ROS run on ubuntu on laptop and ROS melodic on Raspbian Buster if your ROS is on RPi for package installation.
Master Node
Be sure that your master node is up during the following step. Please refer to Multiple machine setup for ROS melodic
Create a catkin workspace
If you didn’t have a catkin workspace, create one first. (Please do not use the one for building ROS distribution, i.e. ros_catkin_ws in the previous tutorial. It will cause re-build for every package when you run catking_make and waste time)
1 | mkdir -p ~/catkin_ws/src |
Source the workspace setup1
source ~/catkin_ws/devel/setup.bash
Or you can add it to your .bashrc to save time1
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
Publisher Node
(Ref WritingPublisherSubscriber(python))
We’ll add a publisher node called talker on RPi, so all the following steps are performed on RPi.
Create pakcage for talker
1 | cd ~/catkin_ws/src |
Create a python script for talker
1 | roscd talker |
You can check the file content1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
Read the explaination for the code in Writing a Simple Publisher and Subscriber (Python)
Build and start the talker node
Build workspace1
2cd ~/catkin_ws
catkin_make
Start the node1
rosrun talker talker.py
If things work correctly, you’ll see1
2
3
4
5
6
7
8
9
10
11pi@rpi:~/catkin_ws $ rosrun talker talker.py
[INFO] [1579244074.678847]: hello world 1579244074.68
[INFO] [1579244074.778945]: hello world 1579244074.78
[INFO] [1579244074.878956]: hello world 1579244074.88
[INFO] [1579244074.978917]: hello world 1579244074.98
[INFO] [1579244075.079286]: hello world 1579244075.08
[INFO] [1579244075.179355]: hello world 1579244075.18
[INFO] [1579244075.279409]: hello world 1579244075.28
[INFO] [1579244075.379345]: hello world 1579244075.38
[INFO] [1579244075.479343]: hello world 1579244075.48
...
The talker node is sending mseeages every 100ms.
Check rostopic
After the node has started succefully, we can check topic list on both machies.1
2
3
4daniel@ubuntu-vm:~ $ rostopic list
/chatter
/rosout
/rosout_agg
/chatter is the one talker publishing to.
Subscriber node
We’ll add a subscriber node called listener on laptop, so all the following steps are performed on laptop.
Create pakcage for listener
1 | cd ~/catkin_ws/src |
Create a python script for listener
1 | roscd listener |
You can check the file content1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
# In ROS, nodes are uniquely named. If two nodes with the same
# name are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
listener()
Read the explaination for the code in Writing a Simple Publisher and Subscriber (Python)
Build and start the listener node
Build workspace1
2cd ~/catkin_ws
catkin_make
Start the node1
rosrun listener listener.py
If things work correctly, you’ll see1
2
3
4
5
6
7
8
9
10
11daniel@ubuntu-vm:~ $ rosrun listener listener.py
[INFO] [1579244845.721338]: /listener_2836_1579244845478I heard hello world 1579244846.14
[INFO] [1579244845.820093]: /listener_2836_1579244845478I heard hello world 1579244846.24
[INFO] [1579244845.935054]: /listener_2836_1579244845478I heard hello world 1579244846.34
[INFO] [1579244846.020669]: /listener_2836_1579244845478I heard hello world 1579244846.44
[INFO] [1579244846.133621]: /listener_2836_1579244845478I heard hello world 1579244846.54
[INFO] [1579244846.241096]: /listener_2836_1579244845478I heard hello world 1579244846.64
[INFO] [1579244846.347801]: /listener_2836_1579244845478I heard hello world 1579244846.74
[INFO] [1579244846.424322]: /listener_2836_1579244845478I heard hello world 1579244846.84
[INFO] [1579244846.551422]: /listener_2836_1579244845478I heard hello world 1579244846.94
...
The listener node is receiving mseeages every 100ms.
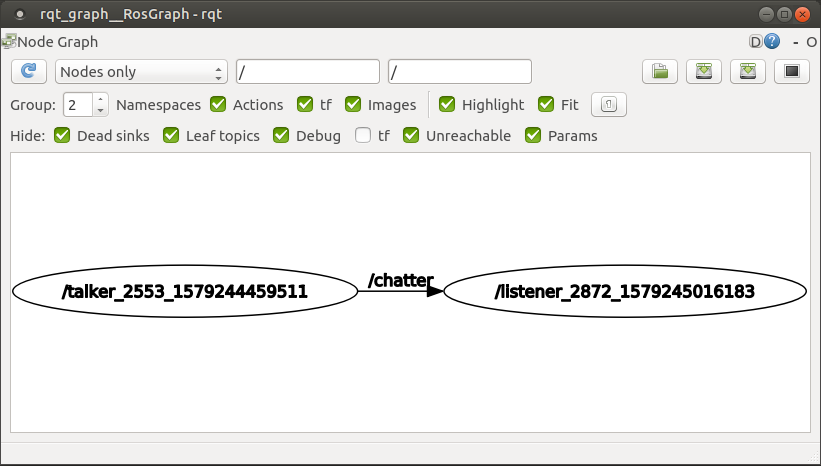
Node diagram
Run rqt_graph on laptop to observe the node diagram
Conclusion
In this tutorial, we leart how to create workspace, create package, and create publisher/subscribe nodes on different machine. In this example, we use rospy to write the node. There’s another official example using roscpp. You can check it if interest you Writing a Simple Publisher and Subscriber (C++)